

โดย วีรยุทธ เลิศบำรุงสุข
HIGHLIGHTS
- Near optimal operation คือการดำเนินการที่สภาวะใกล้เคียงกับสภาวะดำเนินการที่เหมาะสุด ซึ่งสามารถทดแทนออนไลน์ออพติไมเซชัน (online optimization) ได้
- ในบางกระบวนการ เราสามารถเปลี่ยนปัญหา online optimization ให้เป็นปัญหา feedback control ที่สภาวะใกล้เคียงกับการดำเนินการที่เหมาะสุด
ในกรณีที่สภาวะการดำเนินการที่เหมาะสุดเกิดที่ตำแหน่งขอบเขตของข้อจำกัดไม่เท่าเทียม (active inequality constraints) ดังตัวอย่างเตาเผาในตอนที่แล้ว ความท้าทายของการดำเนินการที่เหมาะสุดจะเป็นการควบคุมระบบให้อยู่ที่ขอบเขตของข้อจำกัดไม่เท่าเทียม (active inequality constraints) ที่เกี่ยวข้อง
หากสภาวะดำเนินการที่ให้ค่าต่ำสุดเกิดที่ตำแหน่งหลุม(จุดต่ำสุด)ของฟังก์ชันวัตถุประสงค์ การดำเนินการที่ต่ำสุดจะเป็นการควบคุมระบบให้อยู่ที่จุดหลุมนั้น โชคไม่ดีที่การเปลี่ยนแปลงของสิ่งรบกวนระบบ อาจส่งผลให้สภาวะดำเนินการที่ต่ำสุดขยับเปลี่ยนไป จึงจำเป็นต้องทำการแก้ปัญหาหาค่าที่เหมาะสุดซ้ำ (reoptimization) ซึ่งเกี่ยวข้องกับการทำ online optimization ในกรณีของกระบวนการผลิตแบบต่อเนื่อง
อย่างไรก็ตามในบางปัญหา หากเลือกตัวแปรควบคุม (controlled variable) และตั้งค่าเป้าหมาย (set point) ได้ถูกต้อง การควบคุมระบบให้อยู่ใกล้สภาะวะดำเนินการที่เหมาะสุดเดิมนั้นจะมิได้ส่งผลให้ค่าฟังก์ชัน วัตถุประสงค์เปลี่ยนแปลงไปอย่างมีนัยสำคัญ นั่นคือยังอยู่ในสภาวะ near optimal operation ในระดับที่ยอมรับได้ จึงสามารถหลีกเลี่ยงหรือทดแทนการทำ online optimization ได้
สภาวะดำเนินการ Near Optimal Operation
พิจารณาปัญหา unconstrained optimization P1 ที่ได้จากการลดจำนวนตัวแปรอิสระโดยการอาศัย equality constraints และ active inequality constraints ดังต่อไปนี้

เมื่อ u คือตัวแปรอิสระ (degrees of freedom) หรือตัวแปรปรับกระบวนการ (manipulated variable) ที่เหลือหลังจากการใช้ตอบสนอง equality constraints และ active inequality constraints แล้ว
d คือตัวแปรที่ส่งผลรบกวน
จากการแก้ปัญหา P1 ค่า uopt (ค่า u ที่ทำให้ J มีค่าต่ำที่สุด) จะสามารถเปลี่ยนแปลงตามการเปลี่ยนค่าของ d นั่นคือ เมื่อค่า d ขยับเปลี่ยน จะต้องมีการทำ reoptimization เพื่อหาค่า Jopt และ uopt ใหม่ทุกครั้ง
อย่างไรก็ตาม เพื่อลดความยุ่งยากของการทำ reoptimization ด้วย online optimization ได้มีผู้เชี่ยวชาญ (เช่น Skogestad, 2000) เสนอแนวคิดหาวิธีการควบคุมระบบให้อยู่ที่สภาวะ near optimal operation ภายใต้การเปลี่ยนแปลงของตัวแปรรบกวน d ดังเช่นแนวคิดในรูปที่ 1

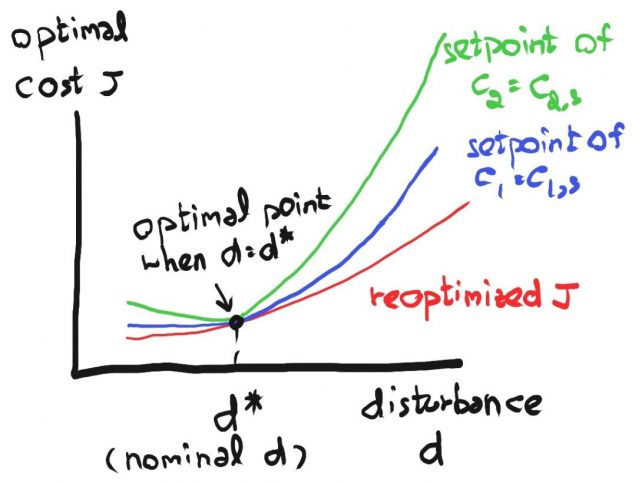
รูปที่ 1 สามารถอธิบายได้ดังนี้
- สมมติว่า เมื่อทำการแก้ปัญหา P1 โดยใช้ค่า nominal ของ d (d*) พบว่าได้ค่า Cost J ต่ำสุดที่ uopt ค่าหนึ่ง ซึ่งเปรียบเสมือนค่าตัวแปรดำเนินการของระบบที่ c1=c1,s และ c2=c2,s
- เมื่อตัวแปร d เกิดเปลี่ยนค่าไป หากทำการ reoptimize ปัญหา P1 จะได้ผลใหม่เป็นดังเส้นสีแดงในรูปที่ 1 (ซึ่งสอดคล้องกับค่า Jopt และ uopt ที่เปลี่ยนไปตาม d นั่นคือ Jopt(d) และ uopt(d))
- หากลดภาระการทำ reoptimization โดยเพียงควบคุม c1ให้อยู่ที่ set point c1,s หรือ c2ให้อยู่ที่ set point c2,s โดยผ่านการปรับค่า u ด้วย feedback control จะได้ผลดังเส้นสีฟ้าและเส้นสีเขียวตามลำดับ
จากรูปจะเห็นว่าการควบคุม c1 ของระบบโดยตั้ง set point c1=c1,s จะมีค่า cost J ต่างจากเส้นสีแดงน้อยกว่ากรณีเส้นสีเขียว ดังนั้นหากผลต่างนี้อยู่ในระดับที่ยอมรับได้ จะหมายความว่าเราสามารถเปลี่ยนปัญหา reoptimization ให้เป็นปัญหา feedback control โดยประมาณได้ นั่นคือ จะคำนวณหาค่า uopt โดยคร่าวๆ ผ่าน feedback control law โดยควบคุมค่า c1 ให้อยู่ที่ set point c1,s แทนการแก้ปัญหา online optimization นั่นเอง
Optimal blending of gasoline
เพื่อให้เห็นภาพชัดเจนขึ้น ลองพิจารณาตัวอย่างปัญหาการผสมแก๊สโซลีน โดยกำหนดปัญหา P2 คือ ต้องการผลิตแก๊สโซลีนอย่างต่อเนื่องในอัตรา 1 kg/s โดยมีค่าออกเทนไม่น้อยกว่า 98 และมีต้นทุนต่ำสุดจากการผสมสายการไหล 3 สาย (ในปริมาณ m1, m2, และ m3 kg/s ตามลำดับ) ได้แก่
- สายการไหลที่ 1 มีค่าออกเทน 99 และมีต้นทุนแปรผันตามปริมาณดังสมการ p1 = 0.1(1+m1) $/kg
- สายการไหลที่ 2 มีค่าออกเทน 105 และมีต้นทุนคือ p2 = 0.2 $/kg
- สายการไหลที่ 3 มีค่าออกเทน d1 และมีต้นทุนคือ p3 = 0.12 $/kg
1สายการไหลที่ 3 มีค่าออกเทน nominal ที่ d* = 95 โดยมีค่าผันผวนในช่วง 95-97
อนึ่ง ค่าออกเทนของสายผสมคำนวณได้จากการเฉลี่ยค่าออกเทนด้วยปริมาณของแต่ละสาย
จากข้อมูลที่กำหนดสามารถสร้างปัญหา P2 เป็นปัญหาการหาค่าต่ำที่สุดได้ดังนี้

จากปัญหา P2 พบว่ามีตัวแปรดำเนินการจำนวน 3 ตัวแปร (m1, m2, m3) และ equality constraint 1 เงื่อนไข (h1) ดังนั้นค่า degrees of freedom จะเหลือเท่ากับ 2 (degrees of freedom = number of variables – number of equality constraints = 3 – 1 = 2) นั่นคือ ตัวแปรดำเนินการ 1 ตัวจะถูกใช้เพื่อ ตอบสนอง equality constraint h1 (เพื่อให้ได้กำลังการผลิตแก๊สโซลีน 1 kg/s)
เมื่อลองทำการหาค่า J ต่ำสุดของปัญหา P2 ภายใต้การเปลี่ยนแปลงค่าออกเทนของสายการไหลที่ 3 ในช่วง 95-97 พบว่า inequality constraint g1 จะ active เสมอ ซึ่งหมายความว่า ตัวแปรดำเนินการอีก 1 ตัวต้องถูกใช้เพื่อตอบสนอง active inequality constraint g1 เสมอ (เพื่อให้ได้ค่าออกเทนผสมที่ 98)
การวิเคราะห์ข้างต้นบอกให้ทราบว่ายังคงเหลือตัวแปรดำเนินการเพียง 1 ตัวที่เป็นตัวแปรอิสระ ดังนั้นหากต้องการหลีกเลี่ยงการทำ online optimization ก็สามารถพิจารณาใช้ตัวแปรดำเนินการที่เหลือนี้ในการควบคุมต้นทุน J (โดยการควบคุมตัวแปรดำเนินการ c ที่เลือกอย่างเหมาะสมเพื่อให้ระบบอยู่ที่สภาวะ near optimal operation) โดยการใช้ feedback control และอ้างอิงตารางที่ 1
ตารางที่ 1 ผลการเปรียบเทียบค่า Cost J ที่เกิดจากการทำ Reoptimization (online optimization) กับค่าของกรณีการควบคุมระบบให้อยู่ที่สภาวะ near optimal operation ภายใต้การขยับเปลี่ยนของตัวแปรรบกวน d (ค่าออกเทนของสายการไหลที่ 3)

อนึ่ง ข้อมูลเพิ่มเติมเกี่ยวกับการเลือกตัวแปรดำเนินการ c เพื่อควบคุมนั้นสามารถศึกษาได้จากงานของ Skogestad (2000, 2004)
สรุปแล้ว เมื่อทำการแก้ปัญหา P2 ที่สภาวะ Nominal (ค่าออกเทนของสายการไหลที่ 3 = 95) จะได้คำตอบต้นทุนต่ำสุดคือ J = 0.1372 ที่ค่าตัวแปร m1 = 0.2600, m2 = 0.1960, และ m3 = 0.5440 ดังนั้น ค่าของ m1, m2 หรือ m3 ดังกล่าวจึงอาจถูกใช้เป็นค่าเป้าหมาย (set point) สำหรับการควบคุมระบบให้อยู่ที่สภาวะ near optimal operation ต่อไป
ตารางที่ 1 ชี้ให้เห็นว่า ถ้าควบคุมระบบให้อยู่ที่สภาวะ near optimal operation โดยการควบคุมตัวแปรอิสระ m1 ไว้ที่ set point c1,s = 0.26 จะเกิดผลต่างน้อยที่สุดจากค่าต่ำสุด cost J ของกรณี online optimization หากค่าผลต่างดังกล่าวสามารถยอมรับได้ ก็สามารถใช้ feedback control ของตัวแปร m1 เพื่อทำ near optimal operation แทน online optimization ได้ ตัวอย่างหนึ่งของโครงสร้างระบบควบคุมมีแสดงดังรูปที่ 2

หมายเหตุ ตัวอย่างโครงสร้างระบบควบคุมที่นำเสนอในที่นี้ มีการพิจารณาเพียงในแง่มุมเชิงเศรษฐศาสตร์ ยังมิได้พิจารณาในเชิงความเป็นไปได้ของการควบคุม (controllability) ซึ่งเป็นอีกประเด็นสำคัญที่จะต้องพิจารณาควบคู่ไปด้วย
เนื้อหาบางส่วนในบทความนี้เรียบเรียงและดัดแปลงจากเอกสารอ้างอิงดังนี้
- Skogestad, S. (2000) Plantwide control: the search for the self-optimizing control structure, Journal of Process Control, 10, 487-507.
- Skogestad, S. (2004) Near-optimal operation by self-optimizing control: from process control to marathon running and business systems, Computers and Chemical Engineering, 29, 127-137.
ABOUT THE AUTHOR
วีรยุทธ เลิศบำรุงสุข
ภาควิชาวิศวกรรมเคมี คณะวิศวกรรมศาสตร์ฯ
มหาวิทยาลัยศิลปากร